


Các công nghệ nhận dạng môi trường địa hình đã được phát triển để phát hiện các chất bên ngoài như bụi, bùn, tuyết hoặc mưa trong quá trình lái máy móc xây dựng, máy nông nghiệp và phương tiện mặt đất không người lái (UGV) tự lái trên đường địa hình. Những công nghệ này có thể loại bỏ tín hiệu cảm biến của các chất này trong thời gian thực.

Nhà nghiên cứu Han-Min Lee của KIMM đang đưa ra lời giải thích về kết quả nghiên cứu liên quan đến các công nghệ mới được phát triển. Tín dụng: KIMM
Dự kiến, những công nghệ mới được phát triển này sẽ được áp dụng trong tương lai cho các máy móc công nghiệp như máy xúc, xe ben và phương tiện tìm kiếm, mang đến cho người lao động một môi trường làm việc an toàn hơn. Hơn nữa, những công nghệ này còn có tiềm năng được áp dụng trong xe tự lái của quân đội.
Một nhóm nghiên cứu do Nhà nghiên cứu cấp cao Han-Min Lee tại Khoa Máy công nghiệp DX thuộc Phòng nghiên cứu nền tảng kỹ thuật ảo của Viện Máy móc và Vật liệu Hàn Quốc (KIMM) dẫn đầu đã phát triển các công nghệ nhận dạng môi trường địa hình để lái xe địa hình môi trường như miền núi, vùng ven biển hoặc vùng có tuyết,

Những công nghệ này bao gồm bảo vệ và làm sạch cảm biến, hiệu chỉnh tín hiệu cảm biến và nhận dạng khu vực có thể lái xe, đã được chuyển giao cho các tập đoàn liên quan.
Trong số các công nghệ nhận dạng môi trường địa hình mới được phát triển, công nghệ “mô-đun làm sạch và bảo vệ cảm biến” có thể được sử dụng để phun chất tẩy rửa lên nước bùn hoặc bùn có thể bắn vào cảm biến trong quá trình tự lái địa hình và quét sạch chúng trong thực tế. -thời gian sử dụng cần gạt nước, có thể giúp loại bỏ gần như hoàn toàn các chất gây ô nhiễm.
Ngoài ra, công nghệ “hiệu chỉnh tín hiệu cảm biến” có thể giúp loại bỏ các tạp chất có kích thước nhỏ như bụi, tuyết và mưa có thể tạo ra khi lái xe. Điều này có thể giúp duy trì các điều kiện tự lái trên đường địa hình ngay cả trong điều kiện môi trường không có cấu trúc như thời tiết xấu.
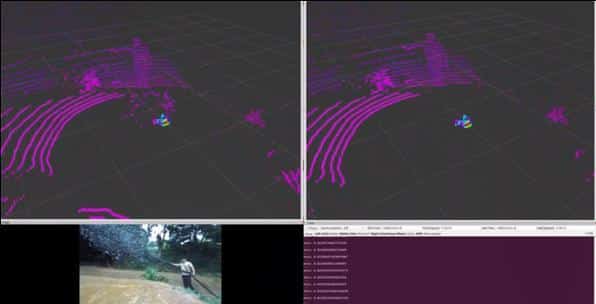
Công nghệ ước tính khu vực có thể lái xe của KIMM có thể phát hiện nhiều chướng ngại vật khác nhau, bao gồm sườn dốc, ổ gà và đường gập ghềnh, thậm chí xác định các tuyến đường thay thế để tránh những chướng ngại vật đó. Tính năng này thực sự hữu ích trong việc ngăn chặn máy móc, phương tiện va chạm với các vật thể khác. Ngoài ra, KIMM đã phát triển công nghệ điều khiển lái xe cho phép điều khiển thời gian thực việc lái xe trên cơ sở thời gian thực bằng cách chọn, trong số các công nghệ khác nhau được mô tả ở trên, chỉ các chức năng cần thiết.
Trước đây, chưa có công nghệ bảo vệ cảm biến nào phù hợp cho môi trường off-road nơi bụi bẩn và bùn bám vào xe. Ngoài ra, không có công nghệ nào có thể loại bỏ tín hiệu cảm biến của các chất lạ như bụi, tuyết hoặc mưa trong thời gian thực khi các chất này được đưa vào tín hiệu cảm biến LiDAR hoặc camera.
Một vấn đề khác là thiếu công nghệ ước tính khu vực lái xe theo thời gian thực có thể nhận ra các chướng ngại vật gập ghềnh như cây cối, đá cũng như các chướng ngại vật rỗng như vách đá và hố. Nhân tiện, LiDAR là một cảm biến được sử dụng để đo khoảng cách và hình dạng của các vật thể bằng tia laser. Khoảng cách có thể được tính bằng cách phóng tia laser và đo thời gian cần thiết để tia laser phản xạ và cũng có thể thu được cường độ của tín hiệu phản xạ.
Các công nghệ nhận dạng môi trường địa hình mới được phát triển đã cải thiện tốc độ xử lý hơn 1,5 lần trong khi vẫn duy trì các chỉ số hiệu suất cao như tốc độ phục hồi ô nhiễm cảm biến, độ chính xác loại bỏ tiếng ồn của cảm biến và độ chính xác ước tính khu vực lái xe địa hình, mở đường cho sử dụng thực tế các công nghệ này trong việc kiểm soát xe tự lái trên đường địa hình.
“Đây là những công nghệ giúp giải quyết vấn đề nhận dạng môi trường, vốn có thể là trở ngại nguy hiểm khi lái xe tự động địa hình.” Nhà nghiên cứu cấp cao Han-Min Lee của KIMM cho biết: “Chúng tôi sẽ nỗ lực hết sức để những công nghệ mà chúng tôi mới phát triển có thể được áp dụng không chỉ cho việc tự lái của các máy móc công nghiệp như máy xúc, xe ben và máy kéo mà còn cũng như khả năng lái tự động của các phương tiện quân sự không người lái như xe tăng và phương tiện tìm kiếm.”
Mời đối tác xem hoạt động của Công ty TNHH Pacific Group.
FanPage: https://www.facebook.com/Pacific-Group
YouTube: https://www.youtube.com/@PacificGroupCoLt






