


Công ty xây dựng Tobishima phát triển hệ thống robot bốn chân tự hành để tuần tra và kiểm tra công trường; thử nghiệm thành công trong đường hầm cao tốc

Robot bốn chân được trang bị nhiều thiết bị khác nhau (Do Công ty Xây dựng Tobishima cung cấp)
Công ty xây dựng Tobishima đã phát triển một hệ thống mới sử dụng robot bốn chân để tự động tuần tra và kiểm tra các công trường xây dựng. Robot có khả năng chụp ảnh, quay video, thu thập dữ liệu đám mây điểm 3D và hỗ trợ liên lạc thoại hai chiều. Việc điều khiển từ xa cho phép tăng tần suất tuần tra, qua đó giúp nâng cao hiệu quả và độ tinh vi trong quản lý thi công. Hệ thống đã được thử nghiệm vào tháng 10 trong quá trình sửa chữa và gia cố một đường hầm cao tốc, và kết quả cho thấy robot hoạt động đúng như kỳ vọng.
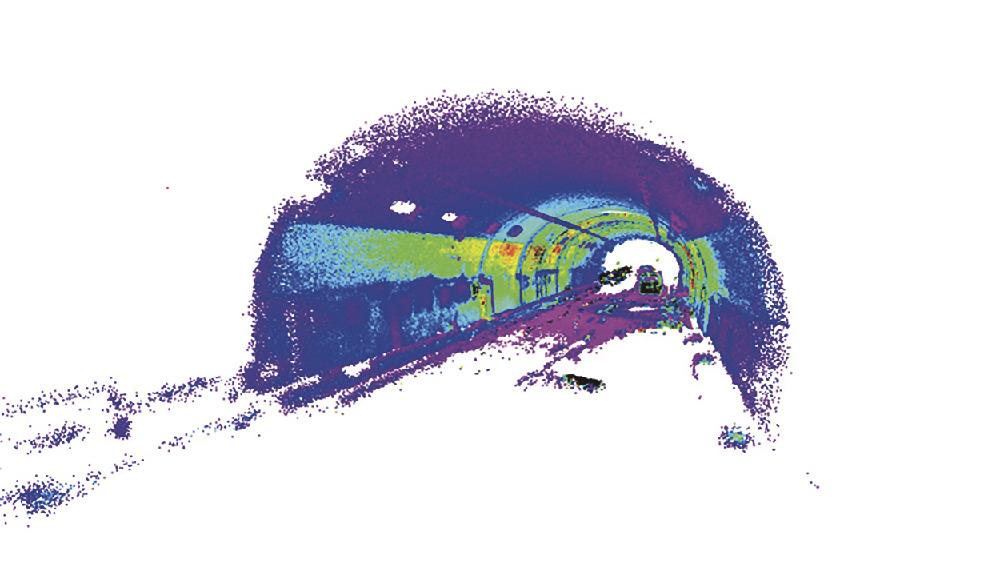
Dữ liệu đám mây điểm 3D được thu thập bởi robot bốn chân (Do Công ty Xây dựng Tobishima cung cấp)
Hệ thống mới được phát triển dựa trên robot bốn chân chạy điện “Unitree Go2” do Unitree Robotics (Trung Quốc) sản xuất, với các cải tiến phù hợp về thời gian hoạt động và chức năng. Ngoài những tính năng tiêu chuẩn như điều khiển không dây, hệ thống còn được trang bị camera đo độ sâu, LiDAR 3D, micro/loa và máy tính tích hợp để liên lạc và điều khiển.
Robot tự ước tính vị trí của mình dựa trên bản đồ và dữ liệu đám mây điểm, sau đó tự động di chuyển đến các điểm đến đã định. Robot tránh chướng ngại vật và thu thập dữ liệu tại các vị trí, khu vực được chỉ định. Hệ thống cũng hỗ trợ điều khiển qua mạng internet. Hình ảnh từ camera, mức pin còn lại và nhiệt độ động cơ có thể được theo dõi theo thời gian thực.
Trong thử nghiệm, dữ liệu đám mây điểm thu được khi robot tự hành được so sánh với dữ liệu đám mây điểm đo thủ công bằng máy quét 3D. Sự chênh lệch về chiều rộng đường hầm, đo tại vị trí cách lối vào khoảng 20 mét, chỉ khoảng 20 mm.
Trong thời gian tới, nhằm hiện thực hóa việc kiểm tra tuần tra tự động, công ty sẽ nghiên cứu tích hợp hệ thống này với công nghệ kiểm tra từ xa bằng máy bay không người lái do công ty tự phát triển, đồng thời bổ sung các tính năng an toàn. Ông Hiroaki Matsuda, Trưởng Phòng Thí nghiệm Hệ thống Sản xuất thuộc Nhóm Nghiên cứu – Phát triển của Viện Nghiên cứu Công nghệ, cho biết: “Chúng tôi sẽ theo đuổi tối ưu hóa tổng thể với mục tiêu phối hợp cùng drone. Chúng tôi muốn phát triển một hệ thống thật sự hữu ích và không gây gánh nặng cho công trường.”






