


Robot dưới nước kết nối tầm nhìn và cảm ứng của con người với biển sâu

Tại vùng biển Aléria, Corsica, Pháp. Nhà cung cấp hình ảnh: DRASSM, Gedeon, Đại học Stanford
Khi robot dưới nước OceanOneK cẩn thận điều hướng về phía lan can boong trên của tàu hơi nước Ý bị chìm Le Francesco Crispi cách bề mặt Địa Trung Hải khoảng 500 m trong tháng này (khoảng một phần ba dặm), nhà robot học Oussama Khatib của Đại học Stanford cảm thấy như thể chính anh ta đang ở đó .
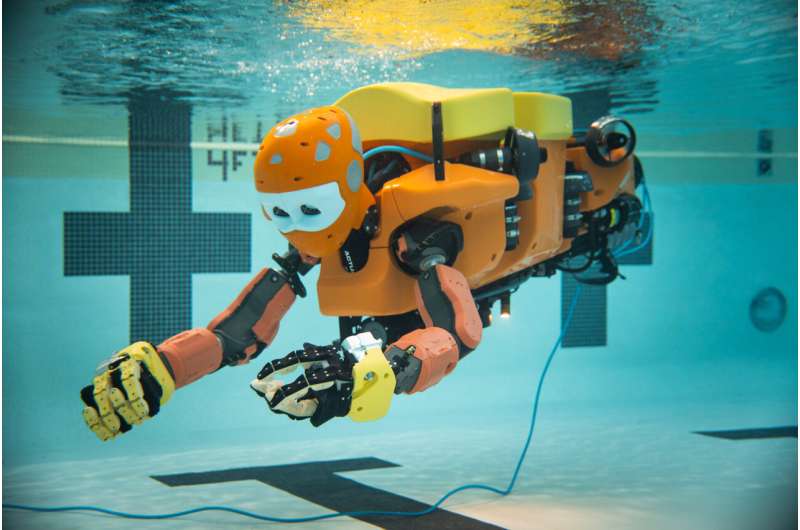
OceanOneK có nửa trên giống hình người và nửa sau mỏng hơn với tám bộ đẩy đa hướng cho phép cơ động cẩn thận dưới nước. Hệ thống phản hồi xúc giác — hoặc dựa trên cảm ứng — và tầm nhìn lập thể của robot đã tạo ra những cảm giác cực kỳ thực tế, ngang bằng với những gì anh ta sẽ trải qua khi anh ta ở bên dưới, chứ không phải ở trên tàu điều khiển. Nhìn qua đôi mắt của robot OceanOneK và cảm nhận qua bàn tay của nó, Khatib cảm nhận được một kính vạn hoa của sự sống — màu hồng và xanh lá cây và màu cam gỉ — xếp lớp trên và xung quanh con tàu. Anh ta cảm nhận được sức cản của nước và có thể phân biệt được hình dạng và sự gần gũi của di tích lịch sử xung quanh mình.
Khatib, Giáo sư Weichai tại Trường Kỹ thuật và Giám đốc Phòng thí nghiệm Người máy Stanford cho biết: “Bạn đang di chuyển rất gần đến cấu trúc tuyệt vời này và một điều gì đó khó tin sẽ xảy ra khi bạn chạm vào nó: Bạn thực sự cảm nhận được nó”. "Tôi chưa bao giờ trải qua điều gì như vậy trong đời. Có thể nói tôi là người đã chạm vào Crispi ở độ cao 500 m. Và tôi đã làm - tôi chạm vào nó, tôi cảm nhận được."
Sứ mệnh của OceanOneK đến những độ sâu này có hai mục đích: khám phá những nơi chưa từng có ai đi qua và để chứng minh rằng khả năng tiếp xúc, tầm nhìn và tương tác của con người có thể được đưa đến những địa điểm này khác xa nơi con người có thể hoạt động.
Trong khi OceanOneK đã có nhiều cuộc phiêu lưu và thành công đáng chú ý trong hai chuyến đi nhiều điểm dừng quanh Địa Trung Hải, thành tích đáng ghi nhận của nhóm — trong đó có Michel L'Hour, cựu giám đốc nghiên cứu khảo cổ học dưới nước của Bộ Văn hóa Pháp (DRASSM), Vincent Creuze từ LIRMM tại Đại học Montpellier, Denis Degez và Franca Cibecchini từ DRASSM, và thủy thủ đoàn của con tàu - đã thể hiện khả năng tự chủ về chức năng ở độ cao gần 1.000 m. Chính sự thăng tiến này đã khiến OceanOne được đổi tên thành OceanOneK.
Ông Khatib cho biết: “Đây là lần đầu tiên một robot có khả năng đi đến độ sâu như vậy, tương tác với môi trường và cho phép người vận hành cảm nhận được môi trường đó. "Đó là một cuộc hành trình đáng kinh ngạc."

Ảnh: Andrew Brodhead, Stanford News Service
Lần lặn sâu đầu tiên
Chuyến lặn xuống Crispi vào tháng Hai là một phần của chuyến tham quan nhiều điểm dừng ở Địa Trung Hải của OceanOneK bắt đầu vào tháng 9 năm 2021 với hai điểm dừng gần Marseille với máy bay P-38 Lightning thời Thế chiến II ở độ cao 40 m (khoảng 130 ft) và một tàu ngầm , Le Protée, ở độ cao 124 m (khoảng 400 ft). Lần thứ ba là đến một con tàu La Mã thế kỷ thứ hai ở Aléria, Corsica ở độ cao 334 m (gần 1100 ft) và tiếp theo là Crispi.
Sau đó, một cuộc tìm kiếm thời tiết phù hợp đã thôi thúc cả nhóm tiến về Cannes. Ở đó, camera bùng nổ của robot lần đầu tiên được sử dụng để xem bên trong buồng lái của máy bay Beechcraft Baron F-GDPV ở độ cao 67 m (hơn 200 ft). Lần lặn cuối cùng là 852 m — xuống hơn nửa dặm — trong đó, khi tạm dừng để kiểm tra động cơ đẩy, nhóm nghiên cứu thấy đáng lo ngại là rô-bốt không thể bay lên. OceanOneK đã hoạt động hoàn toàn nhưng các đám trôi xung quanh đường dây liên lạc và đường dây điện kết nối với mặt trên đã bị sập, để lại một đường dài, nặng nề chất đống trên đầu robot. Kéo theo sự chùng xuống, họ có thể tiếp tục lặn.
Như một điểm đánh dấu kỷ niệm, OceanOneK đã đặt một tấm bảng dưới đáy biển có nội dung:
Lần chạm đáy biển sâu đầu tiên của robot
Một thế giới mới rộng lớn để con người khám phá
Ảnh: Andrew Brodhead, Stanford News Service
OceanOne… hai
Chuyến thám hiểm của robot OceanOneK đến mốc 1 km đã được thực hiện trong thời gian dài. Nó bắt đầu với vô số giờ thiết kế, thử nghiệm và lắp ráp với các thành viên trong nhóm trong phòng thí nghiệm, hàng chục chuyến đi đến hồ bơi Stanford để gỡ lỗi và vô số bài học cần phải học trước khi đối mặt với sự không thể đoán trước của thế giới thực.
Tiền thân của OceanOneK, OceanOne đã được xây dựng để đạt độ sâu tối đa khoảng 200 m. Để đưa robot vào sâu hơn, các nhà nghiên cứu đã điều chỉnh cơ thể của nó bằng bọt đặc biệt làm từ các vi cầu thủy tinh để tạo ra sức nổi đồng thời có khả năng chịu được áp suất cực lớn ở độ sâu 1 km - áp suất gấp 100 lần so với mực nước biển. Hơn nữa, các cánh tay của robot chứa đầy dầu và cơ cấu lò xo nén dầu để phù hợp với áp suất bên ngoài, ngăn chặn sự sụp đổ và đệm các thiết bị điện tử. Các nhà nghiên cứu cũng cập nhật nhiều thành phần nhỏ trên khắp OceanOne để giảm thiểu lượng không khí có thể nén ở các bộ phận riêng lẻ và giữ cho robot càng nhỏ gọn càng tốt.
OceanOneK có các cải tiến bổ sung giúp tăng tính linh hoạt của chuyển động cánh tay và đầu, và hai loại tay mới — một loại được phát triển bởi phòng thí nghiệm của Mark Cutkosky tại
Stanford và một của Giáo sư Antonio Bicchi của Đại học Pisa và Viện Công nghệ Ý, IIT.
Sẵn sàng cho rắc rối
Những người bơi lội tại Bể bơi giải trí Avery của Stanford trong vài năm qua có thể đã thấy OceanOneK ngâm mình trong khi các nhà nghiên cứu thử các thao tác khác nhau và thử nghiệm với các công cụ. Các công cụ bao gồm hộp để mang đồ vật và máy quay video gắn trên cần cho phép chúng nhìn thấy bên trong những không gian chật chội và khó tiếp cận — những không gian mà robot không thể đi tới.

Nhà cung cấp hình ảnh: DRASSM, Gedeon, Đại học Stanford
Adrian Piedra, cũng là một sinh viên tốt nghiệp tại Stanford Robotics Lab, cho biết: “Đó là nhiều tháng thử nghiệm, trong suốt COVID, hai lần một tuần, khi họ lặp đi lặp lại các vấn đề cho đến khi mọi thứ — chạm, điều khiển, tầm nhìn — hoạt động mà không gặp trở ngại.
Sự chuẩn bị như vậy đã được đền đáp theo nhiều cách, nhưng đặc biệt là khi nhóm cần sửa chữa cánh tay tàn tật của OceanOneK trong chuyến thám hiểm đầu tiên của họ. Khatib cho biết: “Điều này đòi hỏi phải mở robot thành nhiều mảnh trên boong thuyền, vào ban đêm, dưới gió và trong cơn bão”. "Những học sinh anh hùng của chúng tôi — Adrian Piedra và Wesley Guo — đã làm việc không ngừng nghỉ để sửa robot." Theo Khatib, sự kiên trì, quyết tâm và thành công cuối cùng của họ đã khiến mọi người trên tàu kinh ngạc.
"Robot có rất nhiều tính năng và nhiều thành phần liên quan đến nhau đến nỗi nếu có một bộ phận bị hỏng, chúng tôi có thể cần cả ngày để tháo dỡ, sửa chữa và lắp ráp lại", Bo Kim, sinh viên tốt nghiệp Stanford Robotics Lab, người đã đi du lịch cho biết với OceanOne và cộng tác từ khuôn viên trường cho OceanOneK. "Mọi thứ phải kết hợp với nhau và hoạt động đồng thời để có một chuyến thám hiểm thành công, và đó thực sự là một thử thách."
Chuyến thám hiểm tháng Bảy
Mùa hè này, nhóm có cơ hội thứ hai lặn xuống tàu La Mã và tàu Crispi, sau một số khó khăn trong chuyến thăm đầu tiên của họ. Khi lần đầu tiên tiếp xúc với con tàu La Mã, nhóm đã cố gắng - nhưng không thành công - để lấy một chiếc đèn dầu từ con tàu. Tại Crispi vào tháng Hai, một lỗi ở cánh tay đã ngăn cản việc sử dụng camera bùng nổ. Đối với các lần lặn tháng Bảy, tất cả các hệ thống đều hoạt động.
OceanOneK lại lặn xuống con tàu La Mã, lần này dưới sự hướng dẫn của các nhà khảo cổ học của nhóm và mang về thành công một số bình cổ quý giá có từ thời Đế chế La Mã, bao gồm một số chiếc chưa từng thấy trong bộ sưu tập của DRASSM. Đây là những phát hiện đặc biệt ở chỗ chúng vẫn mang tên và nhãn của nhà sản xuất, minh chứng cho lợi ích của việc phục hồi hiện vật siêu sâu cẩn thận.
Trong lần lặn thứ hai xuống tàu Crispi, Khatib đã mở rộng camera bùng nổ vào thân tàu bị gãy, cẩn thận để không chạm vào các cạnh vỡ. Nhà sinh vật học biển của nhóm đã hướng dẫn anh ta và háo hức quan sát khi các san hô bên ngoài nhường chỗ cho các hạt bên trong — các hình thành gỉ sét hình viên đá — cho thấy ảnh hưởng của khoảng tám mươi năm tương tác của vi khuẩn với sắt của con tàu.

Nhà cung cấp hình ảnh: DRASSM, Gedeon, Đại học Stanford
Nhìn lại và phía trước
Piedra nói rằng với nhận thức sâu sắc, anh đã bắt đầu nhìn thấy bức tranh toàn cảnh hơn, những thách thức mà họ đã vượt qua lớn đến mức nào và công việc mà họ đã hoàn thành vĩ đại như thế nào.
"Chúng tôi đi đến Pháp cho chuyến thám hiểm và ở đó, được bao quanh bởi một đội lớn hơn nhiều, đến từ nhiều nguồn gốc khác nhau, bạn nhận ra rằng phần của robot mà bạn đang làm việc tại Stanford thực sự là một phần của điều gì đó lớn hơn nhiều, "ông nói. "Bạn sẽ hiểu được tầm quan trọng của điều này, mức độ mới lạ và quan trọng của cuộc lặn sẽ trở nên mới lạ và quan trọng như thế nào, và điều này có ý nghĩa như thế nào đối với khoa học nói chung."
Dự án OceanOne không chỉ là hiện thân của những đổi mới tiên tiến về xúc giác, rô bốt dưới nước và tương tác giữa con người với rô bốt mà còn mang đến những cơ hội mới cho khoa học biển và các hoạt động kỹ thuật dưới nước, chẳng hạn như kiểm tra và sửa chữa tàu thuyền và cơ sở hạ tầng bao gồm trụ cầu và đường ống chìm.
Các cuộc thám hiểm khác được lên kế hoạch ở nhiều vùng khác nhau trên thế giới, bao gồm các thành phố bị mất tích bị chôn vùi trong hồ sâu, rạn san hô và xác tàu khảo cổ có ý nghĩa quan trọng ở độ sâu vượt xa tầm với của con người mà OceanOneK mang đến một cơ hội duy nhất để hiểu về quá khứ.
Ông Khatib cho biết: “Cách xa con người về thể chất khỏi những không gian nguy hiểm và không thể tiếp cận trong khi kết nối các kỹ năng, trực giác và kinh nghiệm của họ với nhiệm vụ hứa hẹn sẽ thay đổi cơ bản công việc từ xa”. "Hình đại diện robot sẽ tìm kiếm và thu thập vật liệu, xây dựng cơ sở hạ tầng và thực hiện các hoạt động phòng chống và khắc phục thảm họa — có thể là sâu trong đại dương và hầm mỏ, trên đỉnh núi hoặc trong không gian."






