


Kajima và Cơ quan thám hiểm hàng không vũ trụ Nhật Bản (JAXA, Chủ tịch Hiroshi Yamakawa) đang liên kết Trường thí nghiệm Kashima Seisho (Thành phố Odawara, tỉnh Kanagawa) với Cơ sở JAXA Sagamihara (Thành phố Sagamihara), sử dụng máy móc xây dựng điều khiển từ xa để khám phá bề mặt mặt trăng Chúng tôi đã tiến hành một thí nghiệm trình diễn giả định về công việc môi trường. Chúng tôi hình dung ra "các khu vực bóng tối vĩnh viễn" thấp hơn khu vực xung quanh và không nhận được ánh sáng mặt trời trong thời gian dài, chẳng hạn như bên trong các miệng hố ở cực bắc và nam của mặt trăng. Kết quả của thử nghiệm, chúng tôi đã xác nhận tính hợp lệ của công nghệ thành phần và công nghệ nguyên tố cần thiết cho xây dựng.
Phác thảo quá trình phát triển công nghệ xây dựng tự động từ xa thích ứng với môi trường mặt trăng (từ tài liệu thông cáo báo chí)
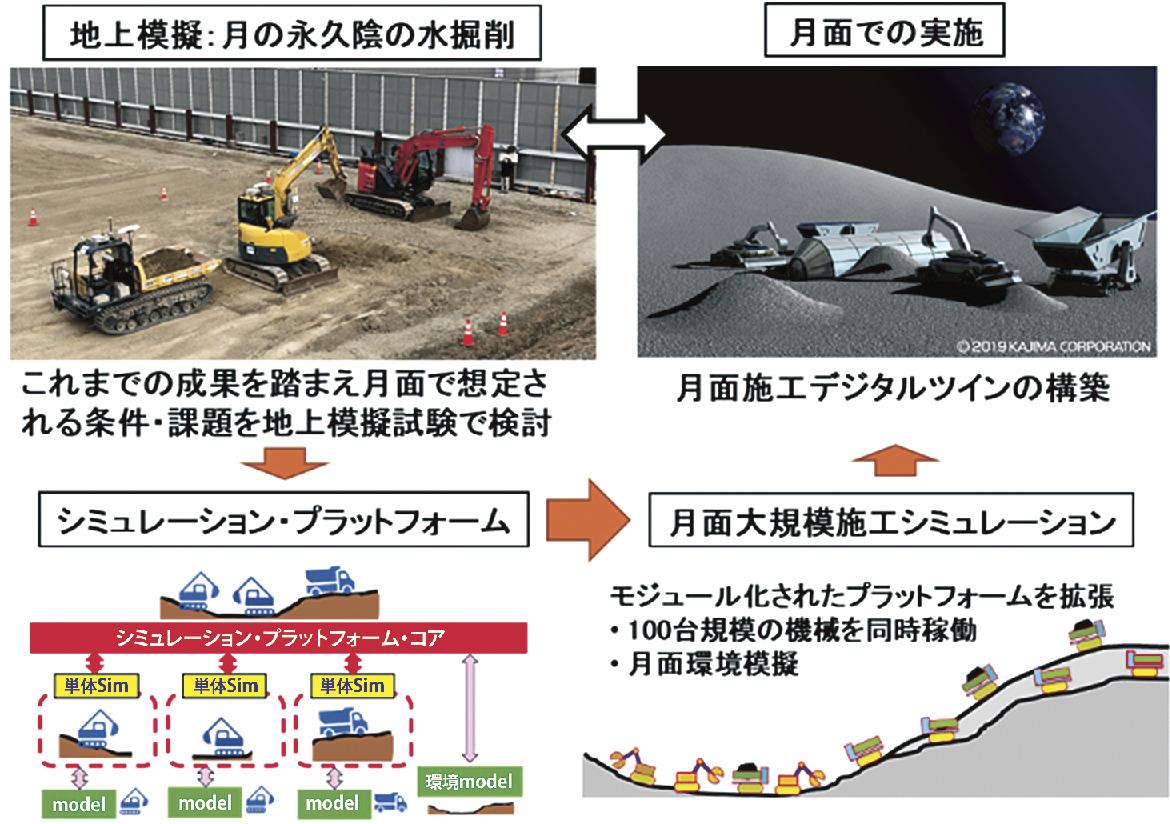
Thí nghiệm này là một phần trong “Dự án xúc tiến phát triển công nghệ đổi mới xây dựng không người lái trong không gian” của Bộ Đất đai, Cơ sở hạ tầng, Giao thông và Du lịch, trong đó Kajima, JAXA và Viện Công nghệ Shibaura đang tham gia. Chúng tôi đang tiến hành nghiên cứu và phát triển giả định công việc xây dựng trên mặt trăng. Một thí nghiệm đã được tiến hành trên mặt đất mô phỏng việc đào cát chứa nước (khai quật bằng nước), được cho là tồn tại trong bóng tối vĩnh viễn. Để áp dụng các kết quả thu được vào các hoạt động trên bề mặt Mặt Trăng, chúng tôi sẽ tạo ra các công nghệ và phương pháp điều chỉnh sự khác biệt về chuyển động giữa mặt đất và bề mặt Mặt Trăng.
Đối với thí nghiệm, Cơ sở JAXA Sagamihara sẽ đóng vai trò là trung tâm chỉ huy và ba máy xây dựng được sửa đổi để điều khiển tự động/từ xa (hai máy xúc lật, một xe ben bánh xích) sẽ được đặt tại Trường Thí nghiệm Kashima Seisho. Việc xây dựng kết hợp sử dụng điều khiển tự động và điều khiển từ xa đã được chứng minh dựa trên kịch bản công việc đào và vận chuyển giả thuyết về việc đào nước trên mặt trăng.
Nó sử dụng công nghệ SLAM, vận hành đồng thời nhiều máy thông qua lái xe tự động và điều khiển từ xa, đồng thời ước tính vị trí của chính nó bằng LiDAR, phát hiện hình dạng của vật thể bằng tia laser và tạo bản đồ môi trường. Thí nghiệm được tiến hành dựa trên một kịch bản giả định công việc diễn ra ở vùng bị che khuất vĩnh viễn trên bề mặt mặt trăng. Kết quả là, nhiều máy xây dựng có thể đào và vận chuyển đất và cát một cách hiệu quả, ngay cả trong môi trường không có hệ thống định vị GNSS (Hệ thống Vệ tinh Định vị Toàn cầu) và xảy ra tình trạng chậm trễ liên lạc. Tính hợp lệ của công nghệ thành phần và công nghệ nguyên tố cần thiết cho công việc ở vùng bị che khuất vĩnh viễn trên bề mặt mặt trăng đã được xác nhận.
Hiện tại, ba bên sẽ phát triển một trình mô phỏng tái tạo chính xác chuỗi nhiệm vụ này và sẽ sử dụng dữ liệu thu được từ các thí nghiệm trình diễn và dữ liệu môi trường bề mặt Mặt Trăng để chuyển sang giai đoạn mô phỏng các nhiệm vụ trên bề mặt Mặt Trăng. Ngoài các biện pháp cải thiện độ chính xác đã được xác minh trong hoạt động này, công ty có kế hoạch sử dụng SLAM tại các địa điểm trên khắp thế giới.






